
L’intuition visuelle à travers laquelle nous représentons le plan euclidien suggère que nous puissions l’orienter selon un sens de rotation. Cette intuition reflète une définition mathématique rigoureuse de l’orientation du plan, qui consiste à choisir une base, et donc implicitement un angle de vecteurs. En fait, choisir une orientation correspond au choix d’une famille de bases orthonormées qui se déduisent l’une de l’autre par une isométrie directe. On peut alternativement le considérer comme le choix d’une famille de bases quelconques qui se déduisent l’une de l’autre par une transformation de détermination strictement positif.
1.Orienter le plan : intuition, représentation et vecteurs de base
1.1.Deux sens de rotations sont possibles dans le plan
Choisissons un point du plan euclidien et traçons deux demi-droites dans des directions différentes à partir de ce point. L’intuition nous dit que nous pouvons « passer » de l’une des demi-droites à l’autre par deux rotations différentes, en choisissant un sens ou un autre. Le sens « direct » ou « trigonométrique », selon notre représentation habituelle du plan, correspond au « sens inverse des aiguilles d’une montre ». Le sens « indirect » correspond à l’autre sens. Cette idée, qu’il existerait deux sens de rotations possibles dans le plan, correspond à un concept mathématique rigoureux, celui d’orientation du plan euclidien.
1.2.La représentation visuelle de l’orientation est une convention
Le plan euclidien (c’est-à-dire l’intuition sous-jacente à la géométrie d’Euclide) est représenté en mathématique moderne par le produit cartésien \(\mathbb R^2\). Le couple de vecteurs \(\vec i=(1,0)\) et \(\vec j=(0,1)\), appelé base canonique, est traditionnellement représenté comme dans la figure suivante et une telle représentation fixe dans notre esprit une « orientation » : le « plus petit angle » (l’angle de plus petite mesure principale) entre les deux vecteurs \(\vec i\) et \(\vec j\) détermine le sens « trigonométrique ». Il faut garder à l’esprit qu’il ne s’agit ici que d’un choix de représentation, qui considère l’ordre croissant des abscisses de gauche à droite ! Si nous représentions les abscisses dans l’autre sens, alors notre représentation de l’orientation déterminée par \(\vec i\) et \(\vec j\) serait inversée; nous pourrions également représenter les abscisses verticalement et les ordonnées horizontalement. Ceci signifie qu’il n’existe pas de représentation visuelle privilégiée de cette orientation « standard ».
1.3.L’ordre des vecteurs naturels de base définit une orientation
Cependant, et indépendamment de notre représentation visuelle, le choix de \(\vec i\) et \(\vec j\), dans cet ordre, détermine bien une orientation privilégiée, dans un sens mathématique précis. Dit autrement, l’orientation est déterminée par l’ordre \(\vec i,\vec j\), ce qui signifie que prendre les deux vecteurs dans l’ordre inverse, soit \(\vec j,\vec i\), détermine une autre orientation. Comme il n’existe que deux orientations possibles du plan (ainsi que nous le verrons), l’ordre choisi sur ces deux vecteurs constitue une définition possible d’une orientation du plan.
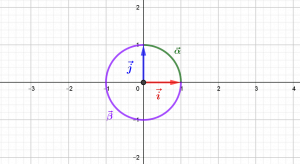
Les vecteurs \(\vec i=(1,0)\) et \(\vec j=(0,1)\) déterminent une orientation du plan. L’angle \(\vec\alpha\) déterminé par la base canonique \((\vec i,\vec j)\) a pour mesure \(\pi/2\), il détermine un sens « direct » naturel, tandis que l’angle \(\vec\beta\) déterminé par le couple \((\vec j,\vec i)\) a pour mesure positive \(3\pi/2\), il représente un sens « indirect » naturel.
2.Définition mathématique de l’orientation du plan
2.1.On oriente le plan euclidien par le choix d’une base
Nous voulons donner ici un sens mathématique précis à cette dernière idée : les deux couples (différents) formés avec les deux vecteurs \(\vec i\) et \(\vec j\) de la base canonique de \(\mathbb R^2\), déterminent les deux (seules) orientations possibles du plan. Rappelons que ce couple de deux vecteurs est appelé une « base de l’espace vectoriel \(\mathbb R^2\) » parce qu’ils permettent de représenter de manière univoque n’importe quel vecteur \(\vec u=(x,y)\) de \(\mathbb R^2\) sous la forme \(\vec u=x.\vec i+y.\vec j\). La raison essentielle en est que ces deux vecteurs sont non nuls et non colinéaires (c’est-à-dire qu’ils ont des directions différentes). Or, il paraît évident que le choix d’une autre base détermine aussi une orientation : deux vecteurs d’une base déterminent un angle orienté, ni nul ni plat, et la mesure principale de cet angle, inférieure ou supérieure à \(\pi\), détermine une orientation, respectivement « directe » ou « indirecte » (par rapport à la base canonique, prise comme référence). Il nous faut donc établir précisément la relation entre bases du plan et orientation du plan, et comment ces notions se rapportent aux vecteurs \(\vec i\) et \(\vec j\).
2.2.L’angle déterminé par une base du plan
Bienvenue sur La Règle et le Compas ! Pour lire les articles du blog en intégralité, merci de vous connecter. Si ce n'est déjà fait, vous pouvez vous inscrire librement ici sur MATHESIS.
0 commentaires